Arduino純正のモーターシールドを購入したので使ってみました。DCモーターなら2個制御できるとのことですので、それを左右の車輪に使うようにして好きな方向に進めるクルマを作ります。
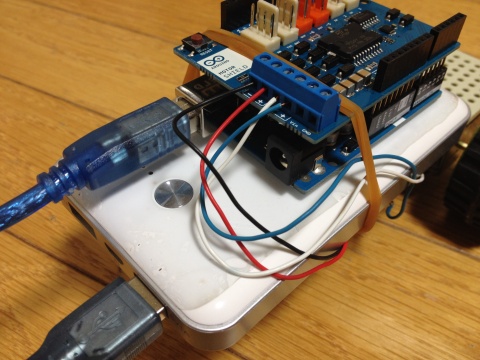
車体は簡単なもので、ギヤボックスを2個用意してモーターと車輪をつけます。モーターからの配線はモーターシールドのコネクタ部分に接続します。プラスとマイナスがありますが、良くわからないので適当につけておいて、後で逆だったら付け直すという作戦でいきます。
モーターシールドには長いピンが出ていますので、それをArduino UNOに接続します。斜めにならないよう、ちょっとずつジワジワと挿入しました。
車体となるユニバーサルプレートにギヤボックスとキャスターをつけて車体は完成です。電源はスマホ充電用のモバイルバッテリーを使うことにしました。モーターシールド付きのArduinoを車体に乗せますが、とりあえず乗ればよいので輪ゴムでとめました。
こんな感じになりました。
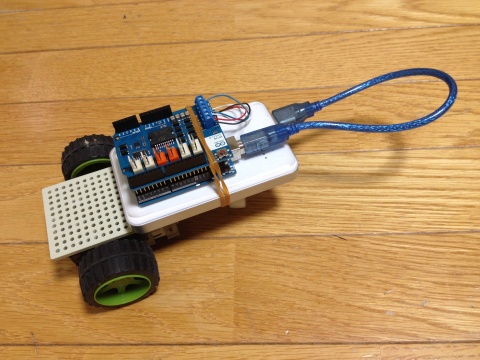
どちらが前なのかわかりませんが、私のイメージでは黒いタイヤが見えているほうが前のつもりです。
コネクタブロックに接続するだけなので、配線は4本だけで済みました。
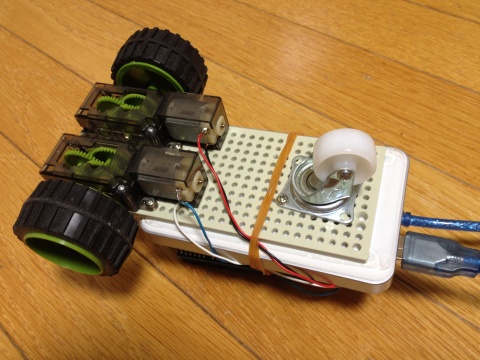
裏面はこんな感じ。ロボコンの余り部品を使ったのであまり綺麗にまとまっていませんが、とりあえず動くレベルになりました。
Arduinoのスケッチは QooSky さんのサイトを参考にしました。
Motorシールドを用いたDCモータの制御方法 (Arduino)
何の問題もなく動作しました。ただこれはサンプルなので前へ行ったり後ろへ行ったり往復するだけなので、今度はスケッチに手を入れてもうちょっと複雑な動きをさせてみたいところです。
次の目標はセンサーを載せて、障害物を避けながら進むようにしてみたいと思います。
カテゴリー: ロボット/IoT

0件のコメント